Sólo otro sitio de WordPress
La tuneladora de la Línea 11 de Metro de Madrid comenzará su andadura en menos de un mes. Fabricada en Alemania, esta máquina colosal de 98 metros de longitud y 1.500 toneladas de peso está probando su mecanismo para perforar el túnel de 5,9 km que va desde la estación de Comillas hasta Atocha. El Debate vuelve a visitar estas obras y se sube a la perforadora para descubrir sus sistemas mecánicos.
El jefe de área de proyectos de la dirección general de infraestructuras de la Comunidad de Madrid, Iván de la Rosa, señala que «el auténtico corazón de la tuneladora se encuentra en el punto donde se concentran los sistemas que permiten mover la rueda de corte y distribuir los fluidos que necesita la máquina para funcionar».
«Junto a esta junta se encuentran también los motores eléctricos que hacen girar la rueda de corte, responsables de transmitir la potencia necesaria para que la máquina pueda perforar el terreno y avanzar bajo tierra», añade de la Rosa durante la visita.
En la cabeza de la tuneladora también está la cámara hiperbárica que, tal y como explica Iván de la Rosa, «es vital cuando los operarios deben realizar trabajos de mantenimiento en zonas presurizadas de la tuneladora».

Rueda de corte de la tuneladora de la Línea 11
«La máquina está diseñada para trabajar con presiones de hasta cuatro bares, equivalentes aproximadamente a la presión existente a 40 metros de profundidad bajo el mar. Para poder intervenir los operarios deben entrar primero en esta cápsula, presurizarse hasta alcanzar la presión de trabajo y, solo entonces, abrir la puerta que da acceso a la zona», añade de la Rosa.
El funcionamiento de la tuneladora se dirige desde la cabina de control, «en este punto se centraliza toda la información necesaria y se monitorea en diferentes pantallas todos los parámetros del proceso de excavación», señala el jefe de área de proyectos.
«Estos van desde la cinta transportadora que retira el material excavado hasta el avance de la rueda de corte o los múltiples parámetros técnicos que deben mantenerse bajo control constante. También se va programando la conducción de la perforadora», señala el jefe de área de proyectos.
A lo largo de los 98 metros de longitud, la tuneladora dispone de una cámara de rescate «que tiene capacidad para 20 personas durante 24 horas. Está equipada con sistemas de comunicación —incluidos varios teléfonos— que permiten mantener contacto con el exterior de la máquina en caso de incidente», subraya Iván de la Rosa.
En este sentido, comenta que además dispone de «autorescatadores individuales, equipos autónomos de respiración para cada trabajador. Estos dispositivos funcionan mediante una reacción química basada en peróxido de potasio que convierte el dióxido de carbono exhalado en oxígeno respirable».
«Gracias a este sistema, los trabajadores disponen de entre media hora y cuarenta minutos de autonomía respiratoria, tiempo suficiente para desplazarse por zonas contaminadas por humo o gases hasta un área segura», remarca de la Rosa a El Debate.
La rueda de corte es la cara de esta tuneladora. El cabezal cuenta con «54 discos de aleación, que permiten un trabajo más homogéneo y eficiente; 172 picas responsables de erosionar el suelo y, por último, 24 rastreles, que retiran el material conforme avanza la perforación», indica de la Rosa.
«Además, durante la excavación se inyectan espuma estructurante y agua a presión para mejorar la trabajabilidad del terreno y facilitar que el material ascienda por el tornillo sinfín», remarca el jefe del área de proyectos.
Una duda que muchos madrileños tienen es por qué esta tuneladora es plana y no en forma de taladro. Iván de la Rosa explica que se ha optado por este diseño «para que toda la rueda de corte entre en contacto con el terreno y perfore en todas las direcciones».
Uno de los componentes fundamentales es el tornillo sinfín. «Este mecanismo se introduce en la cámara de escombros y recoge el material excavado mediante un sistema basado en el principio de Arquímedes. La tierra asciende por el interior del tornillo hasta alcanzar un punto en el que se descarga sobre la cinta transportadora, que ya lo conduce hasta el exterior», apunta el jefe de área de proyectos.
La evacuación del material excavado depende de la cinta transportadora, y para garantizar que este sistema funcione de forma continua se utiliza el acumulador de banda. «En este sistema se almacena un rollo de 500 metros de cinta transportadora que se va liberando a medida que la tuneladora avanza», subraya Iván de la Rosa.
Otro de los lugares curiosos de la tuneladora es el comedor que tiene capacidad para 20 personas y cuenta con un lavabo y un microondas.
La tuneladora «funciona con 15.000 voltios que se transforman cuando llegan a dos cuadros que lo convierten en corriente a 690. De forma que 12 motores en total, seis eléctricos se encargan del accionamiento principal y otros seis, también eléctricos, hacen funcionar el lanzamiento principal».
Otra parte esencial es el «sistema que gestiona el relleno del hueco anular (gap) que queda entre el terreno excavado y el revestimiento de dovelas. Para ello se utiliza un componente A que se almacena en depósitos y que fragua rápidamente, garantizando que el hueco quede sellado y evitando posibles incidencias», apunta de la Rosa.
La tuneladora dispone también de un sistema de refrigeración por agua, con tuberías de entrada y salida. Ambas tuberías «van desde la estación de Comillas y que son dos circuitos con agua fría y caliente y luego hay un enfriador en la citada parada de Metro, de tal manera que se intercambian las temperaturas y se enfrían».
En la obra se utilizan vehículos MSV, encargados del transporte dentro del túnel. En concreto, dos dedicados para el transporte de dovelas, capaces de llevar dos anillos completos cada uno; y uno destinado para el transporte de personas.
Fuente:eldebate.com
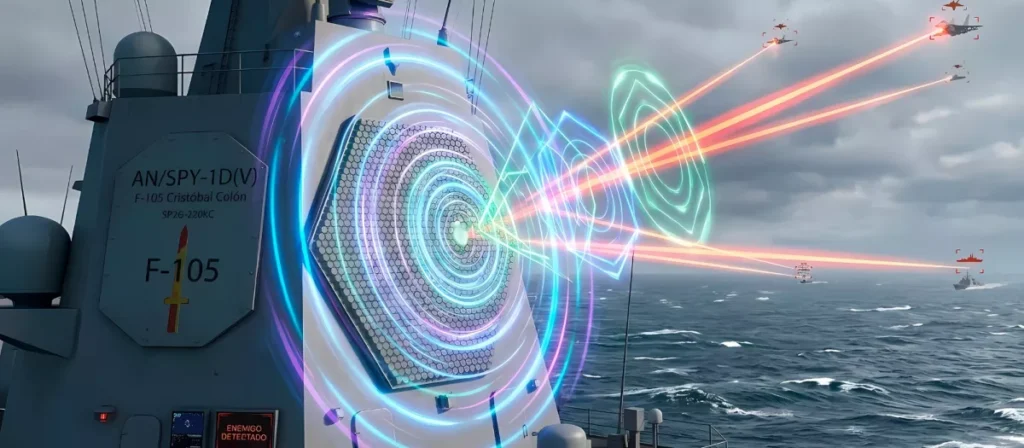
La fragata Cristóbal Colón F-105 dispone de un radar multi-modo/función AN/SPY-1D (V)Kindelán
El sofisticado radar que convierte a la fragata española enviada a Chipre en un escudo antiaéreo.
La fragata española Cristóbal Colón, con numeral de costado F-105, es la quinta fragata de la clase «Álvaro de Bazán» y la que ha decidido enviar el Gobierno a Chipre. La más avanzada fragata española tiene una serie de características que la convierten en la más potente de la flota española, a la espera de las nuevas fragatas de la serie F-110. Pero hay dos elementos esenciales que la convierten en la «joya de la corona» de la Armada Española, y una de las mejores a nivel internacional. La primera es su sistema de combate AEGIS, el mismo que utiliza la US Navy; y la segunda es su radar multifunción SPY-1D(V). La unión de ambos sistemas, desarrollados por la corporación estadounidense Lockheed Martin, proporciona una gran capacidad de guerra antiaérea.
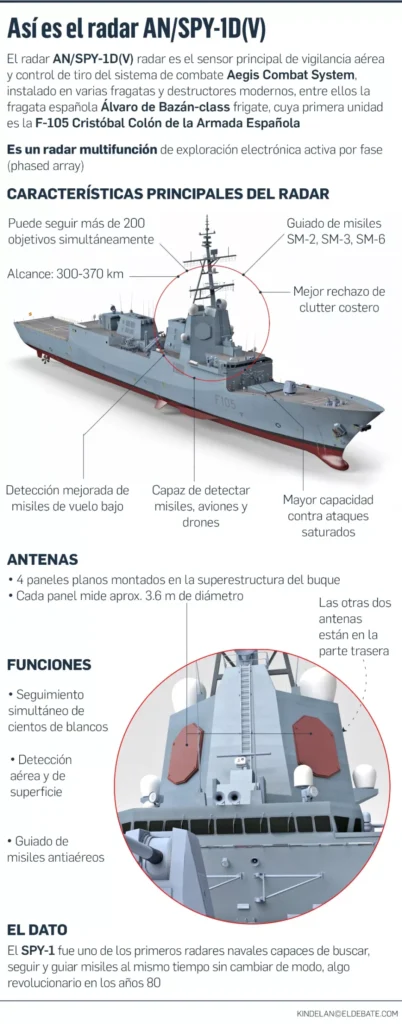
El radar multifunción AN/SPY-1D(V) es uno de los sensores navales más avanzados. Este radar tridimensional permite detectar, seguir y combatir múltiples amenazas aéreas y de superficie de forma simultánea, convirtiendo al buque en una plataforma clave para la defensa aérea de la flota y para las operaciones de la OTAN.
Este radar constituye el núcleo del sistema de vigilancia y defensa aérea del buque. Su función es detectar amenazas, clasificarlas, seguir su trayectoria y proporcionar datos precisos para la interceptación mediante los sistemas de armas del barco.
El SPY-1D(V) es un radar tridimensional de exploración electrónica que opera en banda S y utiliza tecnología de matriz en fase. A diferencia de los radares tradicionales de antena giratoria, el sistema dirige el haz de radar electrónicamente, lo que permite escanear el espacio aéreo a gran velocidad.
El radar está compuesto por cuatro paneles fijos instalados en la superestructura del buque. Estos paneles cubren los cuatro cuadrantes alrededor del barco y permiten mantener una vigilancia continua de 360 grados sin necesidad de partes móviles.
Esta arquitectura proporciona una cobertura permanente del entorno aéreo y de superficie, lo que permite detectar amenazas en cualquier dirección de manera inmediata.
De acuerdo con datos técnicos de Lockheed Martin y de la US Navy, el radar puede realizar simultáneamente varias funciones operativas:
• Vigilancia aérea de largo alcance
• Detección de amenazas de superficie
• Seguimiento automático de objetivos
• Identificación y clasificación de contactos
• Apoyo al control de tiro de misiles
Esta capacidad multifunción permite que un único sensor gestione gran parte de la información táctica necesaria durante una operación naval.

F-105 Cristóbal Colón, la fragata más avanzada que España enviará a Chipre
Una de las principales ventajas del radar SPY-1D(V) es su capacidad para gestionar grandes volúmenes de información en tiempo real. El radar puede detectar y seguir cientos de objetivos simultáneamente, desde aeronaves hasta misiles antibuque o drones, proporcionando una imagen táctica completa del entorno operativo. El sistema de combate Aegis analiza automáticamente esa información, evalúa el nivel de amenaza de cada contacto y asigna los recursos defensivos necesarios. Este proceso permite reaccionar con gran rapidez ante ataques complejos o saturados, en los que varios misiles o aeronaves hostiles se aproximan de forma simultánea.
La versión SPY-1D(V) es una evolución del radar SPY-1D desarrollada para mejorar su rendimiento en entornos costeros. Las operaciones navales cerca de la costa presentan desafíos adicionales para los sensores radar debido a los ecos generados por el terreno, el oleaje o las infraestructuras terrestres. Estos efectos pueden dificultar la detección de objetivos reales. Para resolver este problema, la variante (V) incorpora mejoras en el procesamiento digital de la señal y en los modos de radar que permiten distinguir con mayor precisión entre objetivos reales y falsas detecciones. Según la US Navy, estas mejoras permiten detectar con mayor eficacia amenazas modernas como misiles antibuque que vuelan a muy baja altura sobre el mar.
El radar SPY-1D(V) está completamente integrado en el sistema de combate Aegis del buque. La información generada por el radar se utiliza para guiar los misiles antiaéreos lanzados desde el sistema de lanzamiento vertical del buque, lo que permite interceptar amenazas a gran distancia. Gracias a esta integración, las fragatas de la clase Álvaro de Bazán pueden desempeñar misiones de defensa aérea de área, protegiendo no solo al propio buque, sino también a otras unidades navales que operan en el mismo grupo de combate. De acuerdo con el Estado Mayor de la Defensa, esta capacidad convierte a las fragatas F-100 en una contribución clave de España a las operaciones navales aliadas y a la defensa colectiva en el marco de la OTAN.
El sistema Aegis y el radar SPY-1D(V) son utilizados por varias marinas aliadas, lo que permite una alta interoperabilidad en operaciones multinacionales. Las fragatas españolas pueden integrarse en redes de defensa aérea conjuntas junto a buques de la US Navy y otras marinas aliadas, compartiendo información de sensores y coordinando la defensa frente a amenazas aéreas. Según el Ministerio de Defensa de España, esta capacidad es especialmente relevante en operaciones de la OTAN, donde la cooperación entre sensores y sistemas de combate de distintos países resulta esencial para crear una defensa aérea integrada.


En su etapa como «BW Suez Everett», en la terminal desgasificadora de Sagunto
A consecuencia de los daños provocados por una explosión registrada en la madrugada del pasado 3 de marzo —que Rusia atribuye a drones navales de largo alcance de Ucrania lanzado desde Libia—, el buque LNG ruso “Arctic Metagaz”, finalmente se ha hundido en la posición 34º 17’ N y 17º 04’ E. El citado metanero se encontraba en lastre tras la descarga de un cargamento en China y regresaba al Ártico vía canal de Suez.
El capitán Manuel Hernández Lafuente, colaborador de puentedemando.com, destaca que este buque, en su etapa como “BW Suez Everett”, descargó gas natural licuado para la terminal de SAGGAS en Sagunto, como muestran las fotos que acompañan.
Catalogado en la controvertida “flota fantasma” rusa, navegaba con el AIS apagado y la tripulación consiguió ponerse a salvo en un bote salvavidas dentro de la zona de búsqueda y rescate de Libia. Se trata de un buque sujeto a sanciones internacionales y pieza clave en la logística energética rusa para evadir bloqueos.
La pérdida del buque podría tener consecuencias importantes para los esfuerzos de Rusia por mantener las exportaciones del complejo Arctic LNG 2, que depende de un pequeño grupo de buques metaneros envejecidos que operan al margen de las sanciones occidentales.
Ex “Metagas Everest”, ex “Everest Energy”, ex “Metagas Everest”, ex “BW Everest”, ex “BW GDF Suez Everett”, ex “Suez Everett”, ex “Berge Everett”, se trata de un buque construido en el astillero Daewoo de Corea del Sur y en servicio desde junio de 2003.
De 93.844 toneladas brutas y 77.410 toneladas de peso muerto, medía 277 m de eslora, 43 m de manga, 26 m de puntal y 12,12 m de manga. Tenía una capacidad de carga de 135.267 metros cúbicos en cuatro tanques y estaba propulsado por una turbina de vapor Kawasaki UA-400, con una potencia de 36.689 caballos y mantenía una velocidad de 19 nudos. IMO 9243148.

Fuente:puentedemando.com

UGT alerta del riesgo laboral si se prolonga la incertidumbre en Armas Trasmediterránea.
El Sector Marítimo-Portuario de FeSMC-UGT, sindicato mayoritario en el transporte marítimo y en las empresas del Grupo Armas-Trasmediterránea, ha mostrado su preocupación por el retraso de la Comisión Nacional de los Mercados y la Competencia (CNMC) en autorizar la compra del Grupo Armas Trasmediterránea por parte de Balearia y DFDS.
La situación del Grupo Armas en los últimos años ha sido muy inestable, se han tenido que vender buques para conseguir financiación y se ha paralizado la actividad en diversas ocasiones por problemas técnicos. Este contexto ha afectado tanto a los empleados como a los clientes.
Desde FeSMC-UGT apuntan a que esta situación afecta a unas 1.500 personas y también a sus familias. Por ello, consideran necesario que se tome una decisión cuanto antes sobre la compra por parte de Balearia y DFDS. Aunque aseguran que entienden la complejidad del proceso y respetan el trabajo técnico de la CNMC, creen que alargar la incertidumbre debilita aún más a la empresa y genera tensión entre la plantilla.
El sindicato insiste en que el sector necesita estabilidad, las empresas seguridad y las personas trabajadoras garantías sobre su futuro. Además, han solicitado reunirse con la CNMC para explicar de primera mano la situación laboral y social que hay detrás de esta operación y advierten de que seguir retrasando la decisión puede poner en riesgo el empleo y el futuro a corto plazo de la empresa naviera.
Fuente:puentedemando.com
Embarcó como Mayordomo de las cabinas de Primera Clase

En esta Cartilla de Navegación se puede comprobar que la compañía propietaria del Titanic -con el único objeto de ahorrar sus salarios- desembarcó a todos sus tripulantes, «en alta mar», sin saber si habían fallecido o eran supervivientes, y lo hizo el mismo día del hundimiento, el 15 de abril, incluso antes de que los supervivientes llegasen a tierra, a bordo del buque “Carpathia” el día 18 de abril de 1912.
Esta Cartilla de Navegación, perteneciente al tripulante británico Alexander James Littlejohn, forma parte de la macro exposición Titanic The Reconstruction que la Concejalía de Cultura del Ayuntamiento de Alicante presenta en su Sala de Exposiciones “La Lonja del Pescado”.
La «cartilla de navegación» es el documento más importante para cualquier marino, siempre debe de llevarla con él y siempre debe de presentarla cada vez que embarca o desembarca, ante la Autoridad Marítima del puerto donde haya embarcado.
En la Cartilla, además de los datos personales de cada marino, quedan anotadas, y selladas por la Autoridad Marítima de cada puerto, las fechas, el puerto y el buque en que se embarca, lo mismo que cuando procede a desembarcarse.
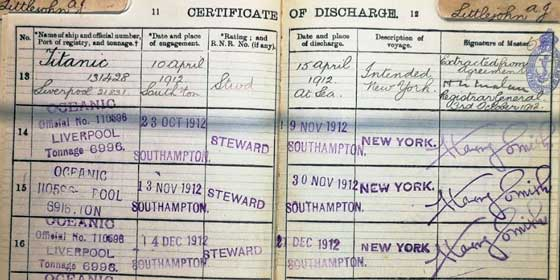
Así lo demuestra la Cartilla de Navegación, de uno de sus tripulantes, superviviente del naufragio, expuesta ahora al público en la exposición del Titanic que se puede visitar en Alicante
Esta «Cartilla de Navegación» que se muestra ahora en Alicante, fue extraviada en el año 1915, y pertenece a uno de los tripulantes supervivientes de la tragedia del Titanic, concretamente a uno de sus mayordomos de primera clase, el británico Alexander James Littlejohn, que, tal y como se puede comprobar en el documento que se muestra, embarcó en el Titanic el día 10 de abril de 1912 y fue ‘desembarcado’ por la compañía propietaria del barco, la White Star Line, el día 15 de abril, es decir, la compañía lo desembarcó el mismo día del naufragio y, además, se ve claramente en este documento, que fue desembarcado «en alta mar», por lo que se deduce que, al confirmarse la tragedia, y sin conocer que tripulantes habían fallecido y quiénes eran los supervivientes, todos fueron desembarcados, incluso antes de llegar a tierra a bordo del buque que los recogió, el Carpathia, el día 18 de abril.
Alexander James Littlejohn había nacido en Londres el día 19 de enero de 1876 por lo que, cuando embarcó en el Titanic tenía 36 años.
Vivía en la ciudad de Southampton, puerto de partida del «buque de los sueños», y residía en Chapel Road.
Embarcó como Mayordomo de las cabinas de Primera Clase y logró salvarse del naufragio en el bote salvavidas nº 13.
Según los datos que aparecen en este documento, Alexander tenía los ojos grises, el pelo blanco y media 5 pies de altura, poco más de metro y medio.
Según los datos que aparecen en esta Cartilla de Navegación, Alexander James Littlejohn, su primer embarque fue en el buque australiano «Orsova», curiosamente el 15 de abril (fecha del hundimiento del Titanic), pero del año 1911. Después navegó en el «Adriatic», posteriormente en el «Olympic» (buque gemelo del Titanic), más tarde en el «Majestic», luego volvió al «Olympic» hasta que, el día 10 de abril, de 1912, embarcó en el Titanic.
Seis meses después de la tragedia del Titanic volvió a embarcar en el «Olympic», donde permaneció navegando hasta el 3 de noviembre de 1914, fecha en la que definitivamente desembarcó para trabajar en tierra, en la ciudad donde vivía, Southamptom, al sur de Inglaterra, curiosamente la ciudad donde residía la última superviviente del Titanic, la también londinense Millvina Dean.
Este importante documento expuesto ahora en Titanic The Reconstruction, en Alicante, consta de 26 páginas, tiene los sellos oficiales de la Autoridad Marítima Británica, está escrito a mano, y lleva grabado el nº 698750.
Villa de Pitanxo.
Era un buque deficiente ?
PROCEDIMIENTOS PARA LA SUPERVISIÓN POR EL ESTADO RECTOR DEL PUERTO (A.1185(33))
Los Estados rectores de puertos son considerados como la segunda línea de defensa en la seguridad marítima y la protección ambiental, complementando las responsabilidades de los Estados de abanderamiento.
La Resolución A.1185(33), adoptada el 6 de diciembre de 2023, establece los Procedimientos para la supervisión por el Estado rector del puerto, 2023 (PSC).
Este documento actualiza y revoca procedimientos anteriores (A.1155(32)) con el propósito fundamental de proporcionar una guía básica para las inspecciones PSC, logrando una aplicación coherente de las disposiciones de supervisión.
La meta es reforzar la seguridad marítima, la protección y la prevención de la contaminación del mar ocasionada por los buques.
Los procedimientos se aplican a buques regidos por los convenios pertinentes de la OMI, como SOLAS, MARPOL y STCW. El proceso inicia con una inspección preliminar de certificados y del estado general del buque. Si existen «motivos fundados», el Funcionario encargado de la Supervisión por el Estado Rector del Puerto (OSERP) procede a una inspección más detallada, incluyendo la verificación de la familiarización operacional de la tripulación.
El control se ejerce mediante la identificación de buques deficientes y la eventual detención si el estado del buque o su tripulación representan un peligro o un riesgo inaceptable para el medio marino.
Los OSERP deben guiarse por un Código de buenas prácticas basado en la integridad, el profesionalismo y la transparencia.
La eficacia de la reglamentación marítima internacional depende en gran medida de su aplicación universal.
Dada la naturaleza del transporte marítimo, los buques raramente hacen escala en sus Estados de abanderamiento, lo que hace imperativo el rol del Estado rector del puerto.
Los esfuerzos de los Estados rectores de puertos han contribuido considerablemente a incrementar la seguridad y la protección marítimas y a prevenir la contaminación.
En virtud de las disposiciones de convenios como el SOLAS, MARPOL y STCW, los Estados Parte están facultados para inspeccionar buques extranjeros que arriban a sus puertos.
Los presentes procedimientos, articulados en la Resolución A.1185(33) de la Asamblea de la OMI, buscan establecer un enfoque uniforme y coherente para estas inspecciones y las medidas de control subsiguientes, ayudando a las Administraciones de los Estados de abanderamiento a asegurar el cumplimiento de las normas internacionales.
Descripción general de la resolución OMI A.1185(33)
El documento A.1185(33) es una Resolución de la Asamblea de la OMI adoptada en su 33° periodo de sesiones.
Su contenido se estructura en cinco capítulos principales y un total de veinte apéndices.
El cuerpo del texto aborda desde el propósito y la aplicación de la supervisión, hasta los requisitos de competencia de los OSERP (Capítulo 1). Seguidamente, se detallan las fases de la inspección (Capítulo 2), el manejo de infracciones y la detención (Capítulo 3), los requisitos de notificación al Estado de abanderamiento y la OMI (Capítulo 4), y los procedimientos de revisión (Capítulo 5).
Los apéndices, incluyendo el Apéndice 1 (Código de buenas prácticas para OSERP) y el Apéndice 2 (Directrices para la detención), proporcionan orientaciones detalladas para garantizar la coherencia operativa.
Caracterización de los procedimientos para la supervisión
El procedimiento de supervisión se distingue en dos etapas principales:
Inspección Inicial:
Consiste en una visita para verificar la validez de los certificados (listados en el Apéndice 12, parte A) y documentos, así como el estado general del buque, su equipo y la tripulación. El OSERP debe tener en cuenta que los certificados pueden presentarse en formato electrónico.
Si los certificados son válidos y la impresión general es de mantenimiento adecuado, la inspección se limita generalmente a las deficiencias denunciadas u observadas.
Inspección más detallada: Se activa cuando existen «motivos fundados».
Estos motivos pueden incluir la ausencia de equipo principal prescrito, certificados inválidos o fraudulentos, deterioro grave del casco o estructura, deficiencias graves en equipos de seguridad o de prevención de la contaminación, o la falta de familiarización del capitán o la tripulación con los procedimientos esenciales de seguridad o de prevención de la contaminación.
El objetivo último es identificar un «buque deficiente», que es aquel cuyo casco, máquinas, equipo, seguridad operacional o dotación no cumplen sustancialmente las normas.
Si un buque se considera deficiente, el Estado rector del puerto debe tomar medidas correctivas y puede dictar una detención.
La detención impide que el buque zarpe hasta que pueda hacerlo sin peligro o sin crear un riesgo inaceptable para el medio marino.
Orientaciones sobre las mejores prácticas para los OSERP
Los OSERP deben ser funcionarios competentes y con experiencia, autorizados por la autoridad competente del Estado Parte. Su conducta se rige por el Código de buenas prácticas (Apéndice 1), cuyos principios fundamentales son:
Integridad:
Deben ser honestos y estar inmunizados contra influencias corruptoras. Es crucial que no tengan intereses comerciales en el puerto, en los buques inspeccionados o en compañías de reparación.
Profesionalismo:
Deben aplicar las normas de conducta aceptadas y poseer conocimientos técnicos.
Esto incluye el uso del buen juicio profesional, observar todas las normas de seguridad e higiene del buque, y ser corteses con la tripulación.
Transparencia: Deben presentar su tarjeta de identidad al subir a bordo, y si hay motivos fundados para una inspección detallada, deben informar inmediatamente al capitán de dichos motivos.
En caso de desacuerdo o detención, deben informar al capitán sobre el derecho de apelación.
Además, deben evitar revelar la fuente de información si la inspección se inició por un informe o queja.
Breve resumen de los Convenios y otras directrices a supervisar
Los procedimientos se centran en la aplicación de múltiples convenios, denominados «los convenios pertinentes».
La lista incluye, pero no se limita a:
Seguridad y Construcción: Convenio SOLAS 1974 (y sus Protocolos), Convenio de líneas de carga, 1966 (y su Protocolo), Convenio de arqueo, 1969.
Prevención de la Contaminación: Convenio MARPOL (cubriendo los Anexos I, II, III, IV, V y VI, relativos a hidrocarburos, sustancias nocivas líquidas, sustancias perjudiciales en bultos, aguas sucias, basuras y prevención de la contaminación atmosférica, respectivamente).
También se incluye el Convenio BWM 2004 (agua de lastre) y el Convenio AFS 2001 (sistemas antiincrustantes).
Titulación y Operaciones: Convenio de formación de 1978 (STCW), incluyendo aspectos de dotación mínima de seguridad y horas de descanso.
Otros Instrumentos:
También se incluyen en las directrices el Código Internacional de Gestión de la Seguridad (Código IGS) y el sistema de Identificación y Seguimiento de Largo Alcance de los Buques (LRIT).
Los Procedimientos para la Supervisión por el Estado Rector del Puerto, 2023 (A.1185(33)) consolidan el papel de los Estados rectores de puertos como segunda línea de defensa en la seguridad marítima y la protección ambiental, complementando las responsabilidades de los Estados de abanderamiento.
La Resolución proporciona herramientas detalladas y criterios claros (como los «motivos fundados» y las «Directrices para la detención») esenciales para que los OSERP realicen su trabajo de manera justa y eficaz.
La clave del éxito reside en la aplicación uniforme de estas directrices y en la interacción profesional de los OSERP con las tripulaciones.
El mecanismo de PSC, incluyendo la notificación obligatoria de deficiencias, fomenta la transparencia y la rendición de cuentas global en la aplicación de los convenios internacionales.
1) Para las Administraciones Marítimas
Para garantizar la aplicación efectiva de la Resolución A.1185(33), se recomienda que las administraciones marítimas:
Fomentar la Aplicación Coherente: Invitar a los Gobiernos a que apliquen estos Procedimientos cuando ejerzan las funciones de supervisión por el Estado rector del puerto.
Garantizar la Competencia de los OSERP:
Asegurar que los OSERP cumplan con los requisitos de competencia y formación, incluyendo la capacidad de comunicarse en inglés con los miembros principales de la tripulación.
Deben realizarse seminarios periódicos para actualizar los conocimientos de los OSERP sobre los instrumentos pertinentes.
Mantener la Transparencia Informativa:
Proporcionar y actualizar los números de teléfono y direcciones pertinentes de las entidades centrales a las que se deben enviar los informes de detención y deficiencias.
Participar en Revisiones:
Continuar examinando los Procedimientos y enmendarlos según sea necesario.
Facilitar la Rectificación:
Notificar a las autoridades del próximo puerto de escala y al Estado de abanderamiento si se permite a un buque zarpar con deficiencias no rectificadas totalmente, bajo condiciones adecuadas.
2) Para los Armadores
Para minimizar el riesgo de detención y garantizar la seguridad operacional, los armadores deben enfocarse en:
Mantenimiento Adecuado:
Asegurar que el casco, las máquinas, el equipo y la seguridad operacional no presenten deterioros significativos y cumplan en lo esencial las normas prescritas en los convenios pertinentes.
Familiarización Operacional: Garantizar que el capitán y la tripulación estén familiarizados con los procedimientos operacionales esenciales a bordo relativos a la seguridad del buque y la prevención de la contaminación.
La aptitud operacional insuficiente es un factor clave que define a un buque deficiente.
Documentación Rigurosa:
Mantener a bordo certificados válidos y documentos actualizados. La ausencia o invalidez de certificados constituye un «motivo fundado» para una inspección más detallada.
Cumplimiento del STCW:
Asegurar que la dotación de seguridad cumpla con lo especificado en el Documento de Dotación Mínima de Seguridad (MSMD) y que se respeten las horas mínimas de descanso de la gente de mar.
Garantizar la gestión de la seguridad (IGS):
Velar por que el Certificado de Gestión de la Seguridad (CGS) sea válido y que el Sistema de Gestión de la Seguridad (SGS) no muestre fallos graves o falta de eficacia en su implantación.
3) Para los Oficiales Supervisores del Estado Rector del Puerto (OSERP)
Para llevar a cabo su función de manera eficaz y justa, los OSERP deben:
Adherirse al Código de Buenas Prácticas: Utilizar su buen juicio profesional, abstenerse de influencias comerciales y tratar a la tripulación con respeto, teniendo presente que el buque es su hogar y lugar de trabajo.
Justificar las Inspecciones Detalladas:
Realizar una inspección más detallada solo cuando existan «motivos fundados» claros, como deficiencias en el mantenimiento, certificados inválidos, o falta de familiarización operacional.
Evitar Demoras Indebidas:
Hacer todo lo posible por evitar que el buque sea detenido o demorado indebidamente. Si un buque es indebidamente detenido o demorado, tendrá derecho a indemnización.
Comunicar Claramente:
Informar al capitán sobre los motivos de cualquier inspección detallada y, en caso de detención, sobre las deficiencias, las medidas correctivas requeridas y el derecho de apelación.
Actuar en Colaboración: En casos de detención, colaborar con los representantes de la Administración del Estado de abanderamiento y la Organización Reconocida (OR) para alcanzar un consenso sobre las medidas correctivas.
4) Para las personas designadas en tierra (DPA / Designated Person Ashore)
El DPA, en su calidad de responsable de la aplicación del Sistema de Gestión de la Seguridad (SGS) de la Compañía (Código IGS), debería enfocarse en:
Vigilancia del SGS:
Vigilar la correcta y efectiva aplicación del Código IGS en la explotación de los buques.
Las deficiencias técnicas u operacionales que demuestren un fallo grave o falta de eficacia en el SGS justificarán la detención del buque y exigirán una auditoría por parte de la Administración o la OR antes de su levantamiento.
Gestión de Deficiencias OSERP:
Cuando se notifique una deficiencia no grave relacionada con el Código IGS, asegurar la adopción y verificación de medidas correctivas eficaces en un plazo no mayor a tres meses, para evitar una subsiguiente detención.
Documentación IGS: Mantener la validez y disponibilidad a bordo de los documentos de cumplimiento (DC) y los certificados de gestión de la seguridad (CGS), así como sus refrendos correspondientes.
Capacitación de la Tripulación:
Asegurar que el personal clave, especialmente los oficiales, esté familiarizado y sea competente en el manejo seguro de equipos y procedimientos operacionales esenciales, ya que la falta de familiarización es una prueba objetiva de un fallo en la implantación del Sistema
Sin comentarios.
COLISIÓN ENTRE LOS PESQUEROS CRUCEIRO DE PAZOS Y PERUCA FRENTE A CABO PRIORIÑO SIN HERIDOS
El Centro de Salvamento Marítimo de A Coruña recibió a las 04:47 h una llamada por VHF del pesquero Cruceiro de Pazos, de 26 metros de eslora y con 9 tripulantes a bordo, informando de que había colisionado con el pesquero Peruca, de 11,90 metros, que se hundió tras el impacto.
Los dos tripulantes del Peruca fueron rescatados inmediatamente por el Cruceiro de Pazos, encontrándose sanos y salvos.
La posición del hundimiento quedó registrada a 1,6 millas al oeste de cabo Prioriño.
El Cruceiro de Pazos informó de la recuperación de diversos restos flotantes, entre ellos cuatro aros salvavidas, la balsa y la radiobaliza, que se encontraba desactivada.
El patrón del Cruceiro de Pazos comunicó que no habían sufrido daños relevantes y que, tras completar la recogida de restos, puso rumbo a Lorbé para desembarcar a los dos rescatados, continuando posteriormente hacia Sada.